
過去の研究テーマ
これまで本研究室では,以下のようなテーマについての研究を行ってきました.
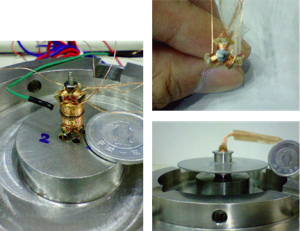
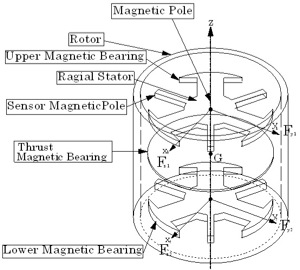
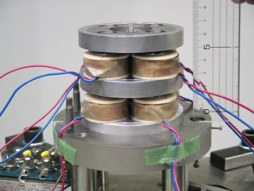
小型3極磁気軸受の制御
|
| 小型3極磁気軸受実験装置 |

|
|
| センサ統合型磁気軸受磁極 | センサ統合型磁気軸受全体図 |
ハードディスクドライブやポリゴンミラー等の小型回転機械向けに新しいタイプの磁気軸受の開発を行います.このような機械ではスペースが限定されていることから、一般の磁気軸受のように変位センサを設置することが困難です.そこで,変位センサと統合された磁気軸受を新規に開発し、近未来の小型回転機械の高速化および高精度化の実現を目指します.
本研究の応用分野:情報機器,精密機器
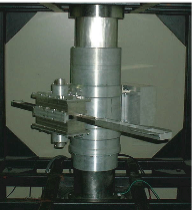
磁気浮上技術を応用した非接触ロボットの制御
|
| 実験装置 |
コンピュータのCPUに代表される高集積度半導体は,クリーンルーム内でシリコンウェハを加工することで製造されます.このシリコンウェハを操作・搬送するクリーンルーム・ロボットには,その作業環境を汚染しないために厳しい清浄性が要求され,一般のロボットのように関節に潤滑剤を使用することが困難です.そこで、磁気浮上技術を応用した機械的接触のない,すなわち,潤滑を必要としないクリーンルーム・ロボットを開発し,将来の半導体のさらなる高集積度化の実現を目指します.
本研究の応用分野:半導体製造,食品製造
磁気力を利用した柔軟アクチュエータの設計と試作
|

|
| 実験装置 | 柔軟アクチュエータ全体図 |
将来の高齢化社会に向けて介護ロボットの開発が行われています.このような介護ロボットは,繊細な人体を柔らかく支持し,姿勢保持あるいは移動を行うことから,多関節で多自由度を備えたアクチュエータが要求されています.しかしながら,一般のモータ使用のロボットでは,運動自由度および重量の点で,このような要求を満足させることは困難です.そこで,電磁力を利用した軽量・コンパクトな多自由度アクチュエータを新規に開発し,これを多数組み合わせることで人に優しい高性能介護ロボットの実現を図ります.
本研究の応用分野:看護,介護,保健,医療
生体信号処理による快適性の評価
人間と機械との共生社会では,人間と機械の間で情報伝達を行う機会が非常に多くなると考えられます.従来の生体信号計測の代表例は,脳波,筋電,心電,脈拍などですが,脳波以外の信号は生体の生化学的な情報を収集することのみを目的としており,「快適性」という精神活動に依存する指標を表すものではありません.本研究課題では,比較的計測が容易な生体信号を検出し,「快適性」の情報を計測および評価することができるか,その可能性を検証します.
本研究の応用分野:人間ー機械間情報伝達,看護,医療,介護